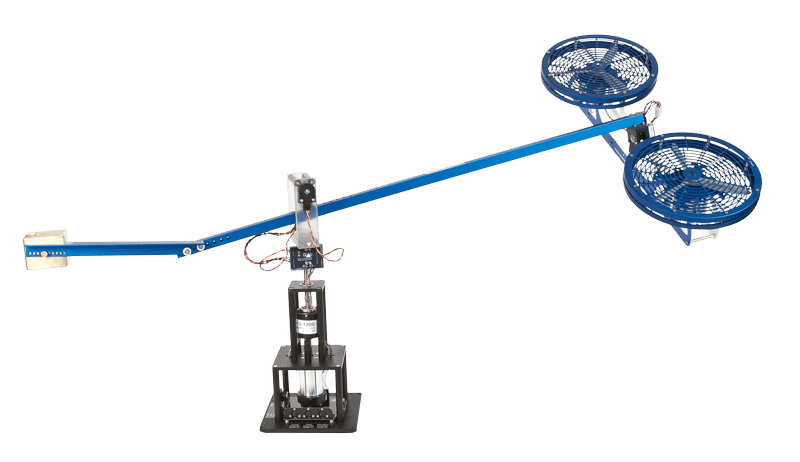
Helicopter
Example
This example is demonstrated in Version 1808-1.
Where you can find this helicopter
Quanser website. 3 DoF Helicopter.
Model:
Benchmark model of Quanser’s 3 DOF Helicopter - 2018
Problem Description
-
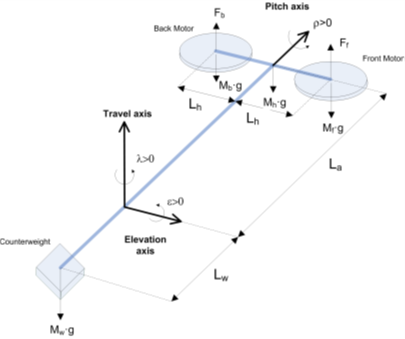
The state vector of the helicopter is x = [q,\dot{q} ]^{T}\in\mathbb{R}^{6}, where q = [\epsilon,\rho,\lambda]^T is the vector of the elevation angle, pitch angle, and yaw angle. The pitch angle \rho is set to be |\rho|\leq 1.
-
The input vector is u=[V_f,V_b]^T, where V_f is the voltage on the front motor and V_b is the voltage on the back motor. The control input is bounded by [0,0]^T \leq u \leq [20,20]^T.
-
The dynamics of the helicopter are given by the following equations:
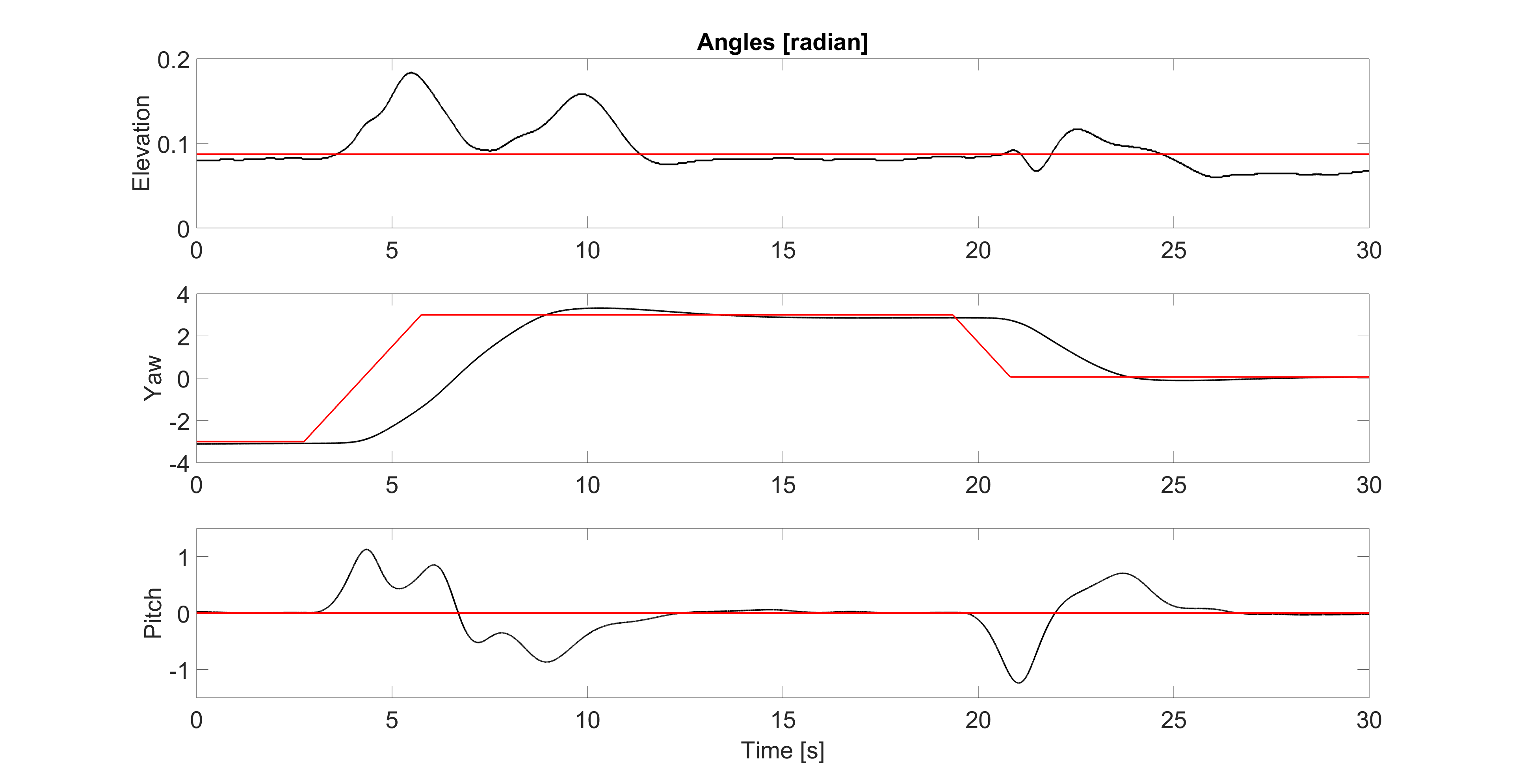
The task is to control the helicopter to track a given yaw reference.
Experiment settings:
- CPU: i7-8700
- DoP: 1
- Prediction horizon T=4 s
- Number of the discritization grids N=48
- Discretization method: Euler
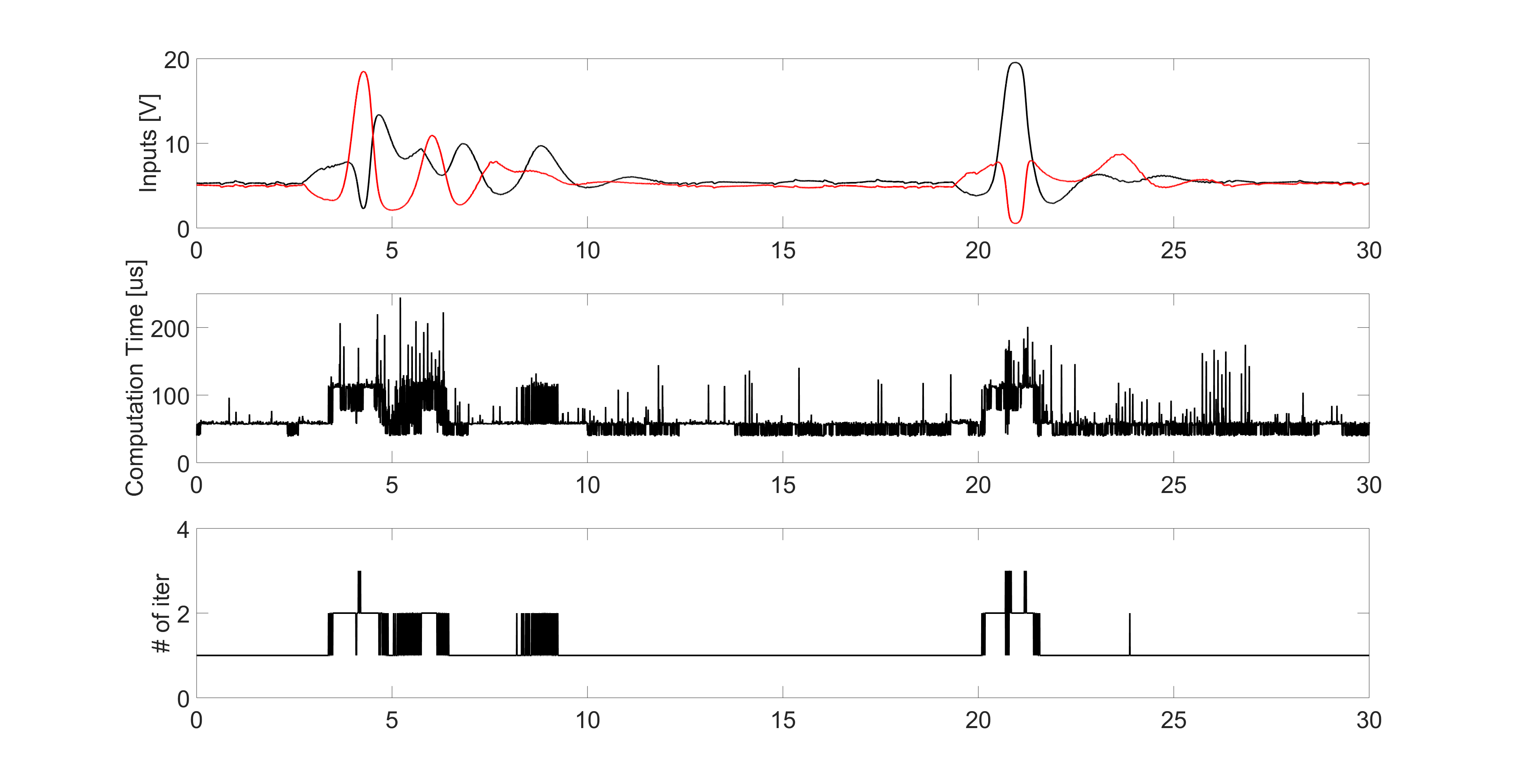
Closed-loop control using ParNMPC
Experiment results (left: first 15 seconds; right: last 15 seconds):