Semi-active Damper
Example
SemiActiveDamper/
Problem Description
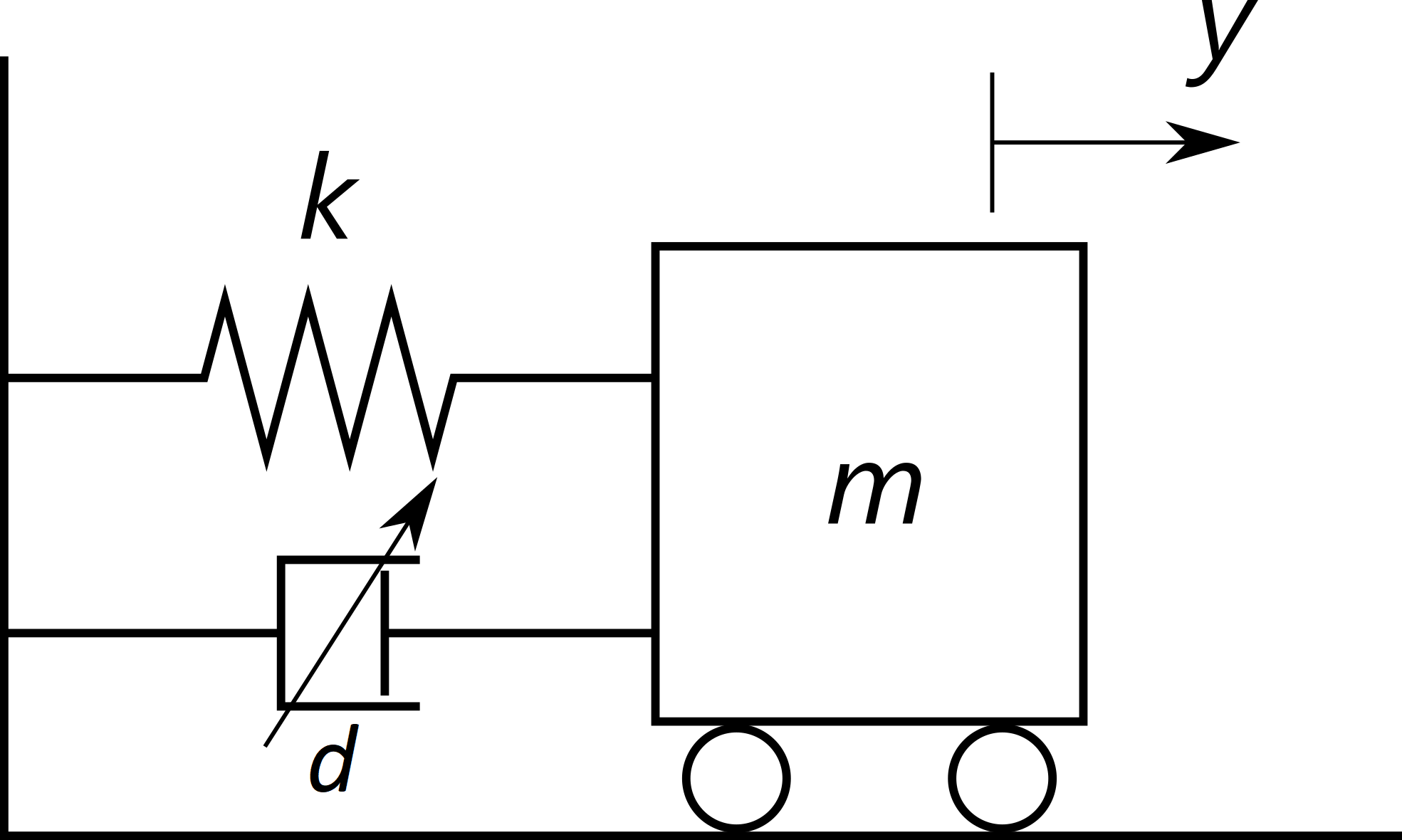
A vehicle contacts the wall through the spring and damper:
-
The state vector of the system is x=[y,\dot{y}]^T, where y is the position of the vehicle.
-
The input is the damping coefficient d, which is constrained with 0\leq d \leq 1.
-
The dynamic equation of this semi-active damper is m\ddot{y} = -ky-d\dot{y}, where k = 1 and m=1.
The task is to control the vehicle's position y to 0 from an initial position.
Closed-loop Simulation using ParNMPC
Step 1. NMPC problem formulation
See Workflow of ParNMPC > NMPC Problem Formulation.
Example
SemiActiveDamper/NMPC_Problem_Formulation.m
Step 2. Code generation and deployment in Simulink
See Workflow of ParNMPC > Code Generation and Deployment > Simulink.
-
Code generation
Example
SemiActiveDamper/Simu_Simulink_Setup.m -
Deployment
Example
SemiActiveDamper/Simu_Simulink.slx